動作リターゲティング
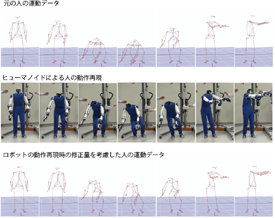
ヒューマノイドロボットを用いて人の運動を模擬する動作リターゲッティング技術を開発している。両者の身体構造の違いを考慮しながら、ロボットは人の運動を極力再現する。一方、ロボットで動作再現した際の誤差を、元の人の運動データに反映させることも可能であり、元の運動データと直接的に比較することで人動作の再現性を定量的に評価できる。
ロボットによる動作の模擬 人体シミュレーションによる双方向の動作模擬
ヒューマノイドロボットを用いて人の運動を模擬する動作リターゲッティング技術を開発している。両者の身体構造の違いを考慮しながら、ロボットは人の運動を極力再現する。一方、ロボットで動作再現した際の誤差を、元の人の運動データに反映させることも可能であり、元の運動データと直接的に比較することで人動作の再現性を定量的に評価できる。
ロボットによる動作の模擬 人体シミュレーションによる双方向の動作模擬