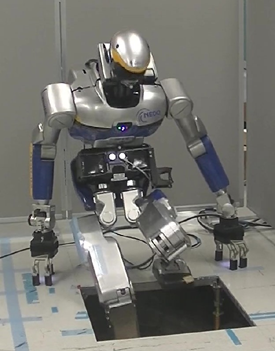
多点接触動作計画・制御 田中 良道, 覃 毅力 Apr 10, 2020 多点接触動作計画・制御 実環境でのヒューマノイドロボットの利用を実現するため、歩行だけでなく様々なロボットの動作計画を目指す。 ヒューマノイドロボットでは、手足や肘、膝を使った環境との接触が重要となるため、このような多点接触制御の研究を行っている。 humanoid 田中 良道 博士後期課程 (D3) 覃 毅力 博士後期課程 (D2) 関連項目 ロボット機器評価 動作リターゲティング 発表文献 Cable Installation by a Humanoid Integrating Dual-Arm Manipulation and Walking In this paper, we present a four layers hierarchical framework to complete the cable installation task with a humanoid robot. By … 覃 毅力, A. Escande, 吉田英一 PDF 引用 プロジェクト